Στα τετρακίνητα ηλεκτρικά αυτοκίνητα αρκούν 2 μοτέρ; Χρησιμοποιώντας 3 ή 4 μοτέρ υπάρχουν περισσότερα πλεονεκτήματα χωρίς κανένα μειονέκτημα;
Στη διάταξη με 3 μοτέρ, η επιλογή 1 εμπρός και 2 πίσω είναι η ιδανική ή μήπως είναι η αντίστροφη επιλογή καλύτερη; Οι απαντήσεις σε αυτά τα ερωτήματα βρίσκονται στις ιδιαιτερότητες και τις λεπτομέρειες της κάθε διάταξης.
Του Νεκτάριου Διατσίδη
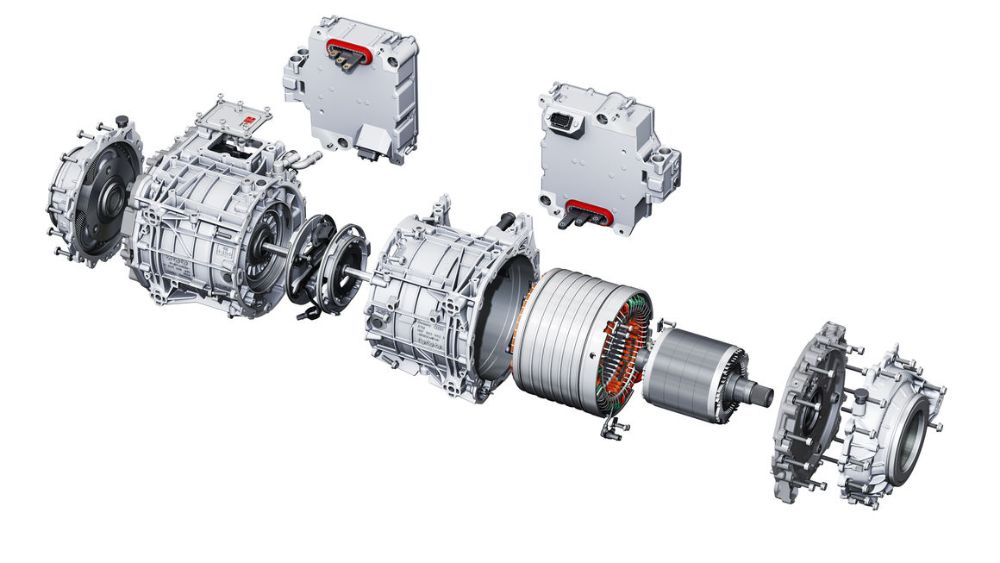
Τα ηλεκτρικά αυτοκίνητα πλέον έχουν τη δυνατότητα να κατασκευαστούν εύκολα με σύστημα τετρακίνησης καθώς οι ηλεκτροκινητήρες είναι μικροί σε μέγεθος και η τοποθέτησή τους μπορεί να γίνει εύκολα κοντά στους τροχούς στους οποίους δίνουν την κίνηση, ενώ στο μέλλον αν ελαφρύνουν περισσότερο θα μπορούν να τοποθετηθούν και μέσα στους τροχούς. Στα αυτοκίνητα με κινητήρα εσωτερικής καύσης το σύστημα τετρακίνησης έπρεπε να μεταφέρει την κίνηση με μεγάλους κεντρικούς άξονες στους τροχούς που ήταν πιο μακριά από τη θέση του κινητήρα, αλλά αυτό ήδη έχει αλλάξει στα υβριδικά και η χρήση κεντρικών αξόνων τείνει να εκλείψει με το διαχωρισμό της κίνησης από τον κινητήρα εσωτερικής καύσης να δίνει κίνηση στον έναν άξονα και με 1 ή 2 ηλεκτρικά μοτέρ να μεταδίδεται η κίνηση και στο δεύτερο άξονα.
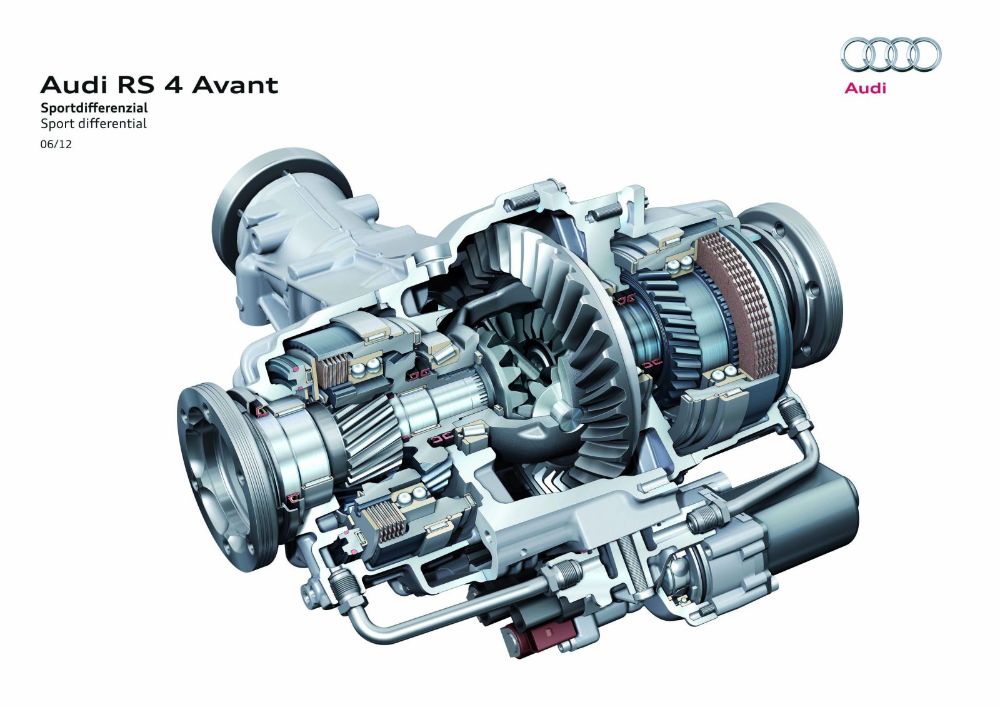
Συγκρίνοντας όλα τα συστήματα τετρακίνησης μέχρι σήμερα, παρατηρείται ότι η μεγαλύτερη εξέλιξη έγινε στην κατανομή της κίνησης ανάμεσα σε δύο τροχούς με τη διαφοροποίηση της κίνησης στον αριστερό από τον δεξιό τροχό. Το μηχανικό διαφορικό που δίνει την κίνηση στους δύο τροχούς, είτε με τη συνεργασία των φρένων αριστερά και δεξιά, είτε με την χρήση συμπλεκτών στα λεγόμενα ενεργά διαφορικά (Torque Vectoring), μπορεί να κατανέμει την κίνηση με διαφορετικό ποσοστό ανάλογα με την ηλεκτρονική διαχείριση και την εντολή φρεναρίσματος ή εμπλοκής του συμπλέκτη του ενός από τους δύο τροχούς αντίστοιχα. Στα υβριδικά και ηλεκτρικά αυτοκίνητα με τοποθέτηση ενός ηλεκτροκινητήρα ανάμεσα στον αριστερό και δεξιό τροχό, η κίνηση διαφοροποιείται με τη χρήση των φρένων ηλεκτρονικά, ενώ σε αυτά που έχουν δύο ηλεκτροκινητήρες έναν για κάθε τροχό, η διαφοροποίηση γίνεται ηλεκτρονικά με τον έναν ηλεκτροκινητήρα να δίνει λιγότερη κίνηση ή και να επιβραδύνει λειτουργώντας ως γεννήτρια και τον άλλο να δίνει κανονικά όση κίνηση χρειάζεται.
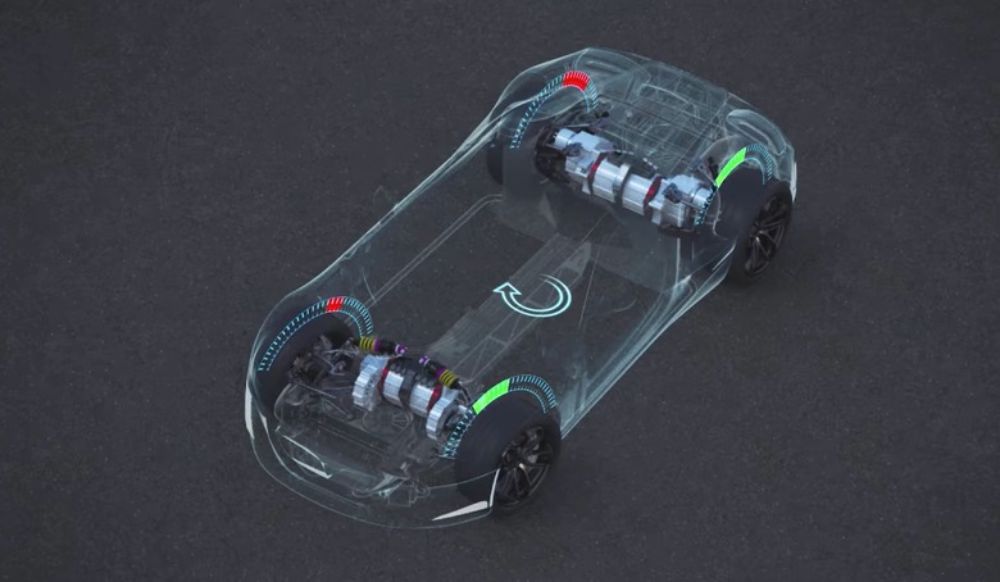
Σύμφωνα με τα παραπάνω η διαφορά στη λειτουργία της κατανομής της κίνησης μεταξύ δύο τροχών στην περίπτωση του ενός μοτέρ ανά άξονα, έχει να κάνει με τη χρήση των φρένων, ενώ στην περίπτωση των δύο μοτέρ ανά άξονα αυτό που συμβαίνει είναι η ανάκτηση κινητικής ενέργειας τουλάχιστον στον έναν από τους δύο ηλεκτροκινητήρες που λειτουργεί ως γεννήτρια και παράγει ρεύμα χωρίς θερμικές απώλειες. Με αυτή τη διαφορά στην ηλεκτρονική διαχείριση της κίνησης του κάθε τροχού στα τετρακίνητα ηλεκτρικά αυτοκίνητα, εύλογα βγαίνει το συμπέρασμα ότι δεν υπάρχει καλύτερη διάταξη από τα 4 μοτέρ για να κατανέμεται η κίνηση σωστά αλλά και να διαφοροποιείται από επιβράδυνση σε επιτάχυνση ξεχωριστά σε κάθε τροχό. Με τη δυνατότητα ανεξάρτητης κίνησης σε κάθε ένα τροχό, τα αποτελέσματα στη δυναμική συμπεριφορά του αυτοκινήτου είναι εντυπωσιακά με τις όποιες τάσεις υποστροφής ή υπερστροφής να μην υπάρχουν παρά μόνο αν είναι επιθυμητό η οδική συμπεριφορά να έχει συγκεκριμένο τρόπο εκδήλωσης αυτών των φαινομένων προς όφελος της ευελιξίας, της κατευθυντικότητας και του καλύτερου δυνατού κρατήματος του αυτοκινήτου στις στροφές, είτε σε έντονες επιταχύνσεις αλλά και σε όλες τις υπόλοιπες καταστάσεις.
Με 4 μοτέρ
Η τετρακίνηση με 4 μοτέρ μπορεί να εφαρμόσει δυνάμεις στο αμάξωμα χωρίς να είναι σε διαδικασία επιτάχυνσης και αν το αυτοκίνητο πρέπει ακαριαία να αλλάξει κατεύθυνση τότε στους εξωτερικούς τροχούς εφαρμόζονται δυνάμεις επιτάχυνσης και κίνησης εμπρός, ενώ στους εσωτερικούς δυνάμεις επιβράδυνσης και κίνησης προς τα πίσω, εφαρμόζοντας συνολικά δυνάμεις στο αμάξωμα αντίθετες από την αδράνειά του, οι οποίες προκαλούν άμεση αλλαγή της πορείας του, με το μέγιστο δυνατό κράτημα στα ελαστικά. Η διαδικασία αυτή συμβαίνει και στα αυτοκίνητα με ένα μοτέρ ανά άξονα αλλά χρειάζεται να φρενάρουν έντονα οι εσωτερικοί τροχοί και για να υπάρχει επιτάχυνση στους εξωτερικούς πρέπει να δοθεί επιπλέον δύναμη στα μοτέρ εμπρός και πίσω άξονα η οποία θα μοιραστεί από τα διαφορικά και θα χαθεί στους εσωτερικούς τροχούς παρουσιάζοντας μεγάλη απώλεια και μικρή επίδραση στη δυναμική συμπεριφορά του αυτοκινήτου.
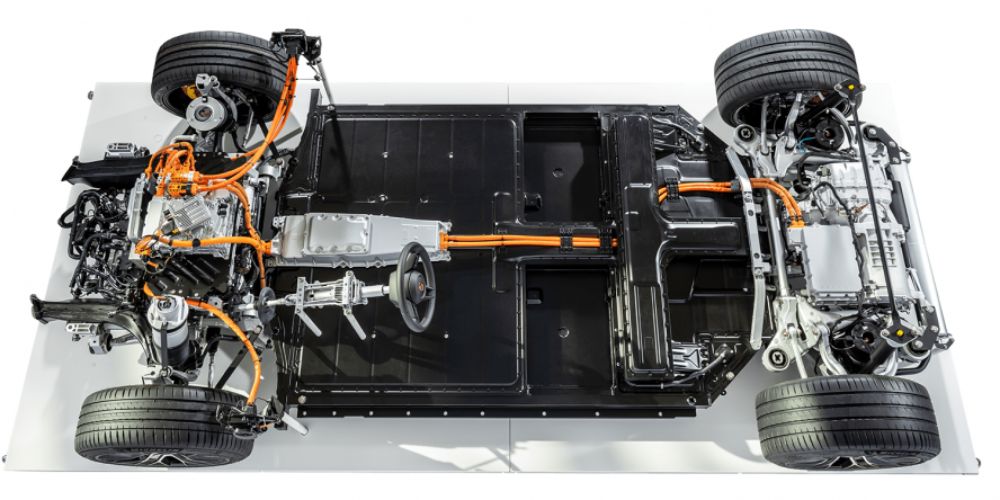
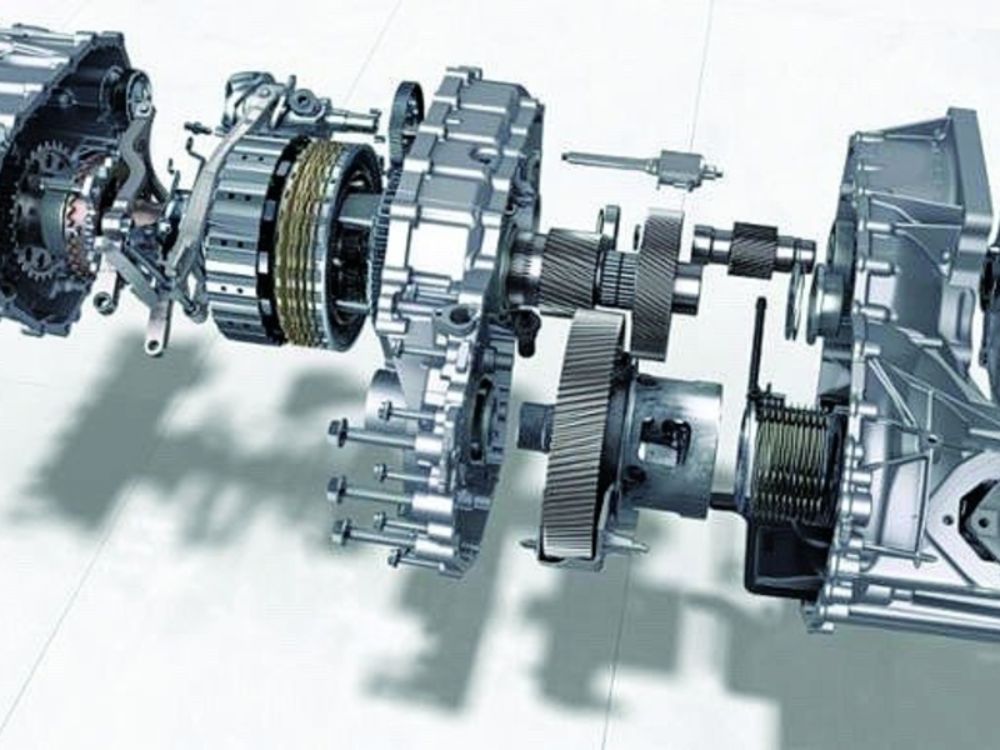
Ενώ υπάρχει αυτή η διαφορά λειτουργίας από την πλευρά των δυνάμεων, την μεγαλύτερη έντασή τους και την καλύτερη απόδοση στα συστήματα με 4 μοτέρ, είναι εντυπωσιακό το πως συγκεκριμένα η Porsche Taycan που είναι ένα ακριβό υπεραυτοκίνητο ουσιαστικά και δεν θα υπήρχε πρόβλημα στο κόστος να κατασκευαστεί με 4 μοτέρ, διαθέτει μόνο 2. Οι λόγοι που οδήγησαν τους σχεδιαστές σε αυτή τη λύση είναι το μικρότερο δυνατόν βάρος του συστήματος αλλά και η χρήση 2 ταχυτήτων στο πίσω μοτέρ. Το ένα μοτέρ ανά άξονα πρέπει να συνοδεύεται και από ένα διαφορικό ενώ τα δύο μοτέρ πρέπει να έχουν δύο σειρές γραναζιών με αποτέλεσμα το βάρος και στις δύο περιπτώσεις να είναι περίπου το ίδιο για ισοδύναμη ισχύ ανά άξονα. Επίσης το μέγεθος του ενός μοτέρ και των δύο μικρότερων ισοδύναμων μπορεί να κυμαίνεται στα ίδια επίπεδα καθώς υπάρχουν λύσεις ως προς τη διάταξη των περιελίξεων των μοτέρ ώστε τα δύο να έχουν ακτινική περιέλιξη για να είναι πιο στενά και να αντιστοιχούν στις διαστάσεις του ενός. Στα δύο μοτέρ ανά άξονα δεν μπορεί να χρησιμοποιηθεί κιβώτιο ταχυτήτων χωρίς να αυξηθεί το βάρος και επομένως για να υπάρχουν 2 ταχύτητες ή περισσότερες ευνοείται η χρήση του ενός μοτέρ.
Για να βελτιωθεί ακόμη περισσότερο η δυναμική συμπεριφορά της Porsche Taycan χρησιμοποιείται συνδυαστικά με τα φρένα και ένα ηλεκτρονικά ελεγχόμενο διαφορικό. Το ηλεκτρονικά ελεγχόμενο μπλοκέ διαφορικό δεν έχει τη δυνατότητα διαφοροποίησης της κατανομής της ροπής ανάμεσα σε αριστερό και δεξιό τροχό εκ των προτέρων όπως το ενεργό διαφορικό Torque Vectoring το οποίο στέλνει κίνηση είτε στον ένα είτε στον άλλο ακόμη και όταν οι ταχύτητες περιστροφής έχουν διαφορά, αλλά μπορεί να αλλάξει την κατανομή της ροπής όταν υπάρχει σπινάρισμα σε κάποιον τροχό. Έτσι ενώ αρχικά χρησιμοποιούνται τα φρένα για να υπάρξει διαφοροποίηση της κίνησης και της ροπής σε κάθε τροχό, στη συνέχεια επεμβαίνει το ηλεκτρονικά ελεγχόμενο διαφορικό για να συνεχίσει το διαχωρισμό της κατάλληλης ροπής για την καλύτερη δυνατή διαχείριση της πρόσφυσης και της δυναμικής συμπεριφοράς του αυτοκινήτου.
Οι 2 ταχύτητες ευνοούν την επιτάχυνση και χρειάζονται μόνο στον πίσω άξονα γιατί στην έντονη επιτάχυνση υπάρχει μεταφορά φορτίου και το περισσότερο βάρος μεταφέρεται σε αυτούς. Το ηλεκτρικό μοτέρ αν και έχει μία αναλογική συμπεριφορά της διαθέσιμης ροπής του από τις χαμηλές στροφές, με τη χρήση μίας κοντής 1ης ταχύτητας καταφέρνει να δώσει πολύ μεγαλύτερη ροπή στην εκκίνηση χωρίς να φτάσει στα όρια της υπερφόρτισης των περιελίξεών του, ενώ ταυτόχρονα ανεβάζει γρήγορα τις στροφές του για να δώσει και πάλι μία κινητική ενέργεια πίσω στη διαδικασία αλλαγής της 2ης ταχύτητας λίγο μετά την εκκίνηση. Ο συνδυασμός 2 ταχυτήτων, δυνατότερου μοτέρ πίσω σε σχέση με το εμπρός, χαμηλού κέντρου βάρους, αναρτήσεων και τετραδιεύθυνσης, ηλεκτρονικού ελέγχου φρεναρίσματος του κάθε τροχού ξεχωριστά και ελέγχου του μπλοκέ διαφορικού δίνουν στην Porsche Taycan τη δυναμική συμπεριφορά που χρειάζεται για πλήρη αξιοποίηση των δυνατοτήτων του αυτοκινήτου, χωρίς μειονεκτήματα.
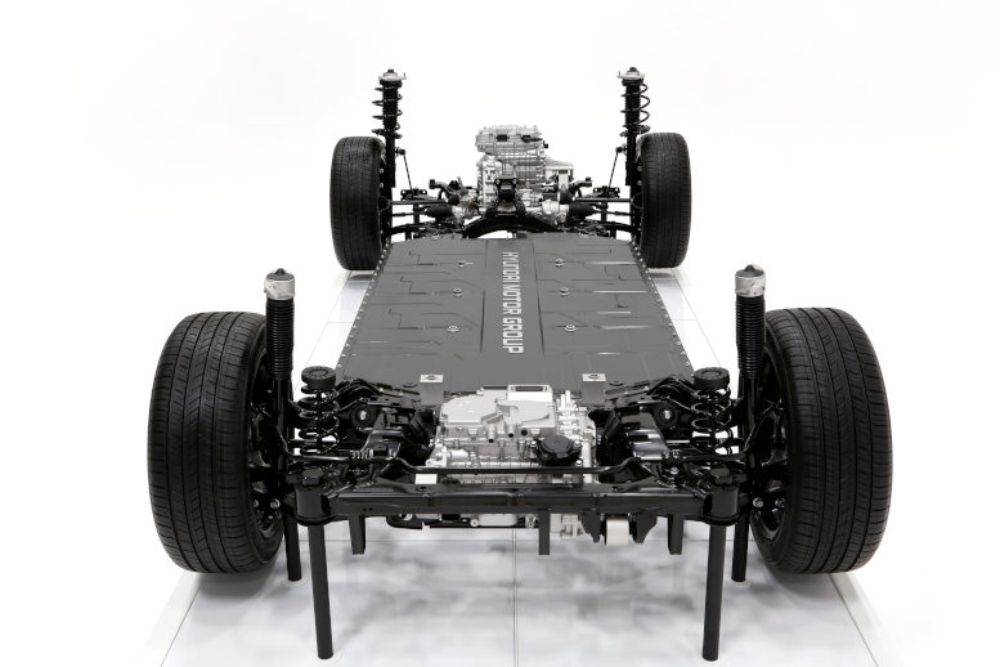
Στις κατηγορίες των πιο προσιτών τετρακίνητων ηλεκτρικών αυτοκινήτων και με βάση τα παραπάνω, το κόστος τελικά ανάμεσα στη χρήση ενός μοτέρ και διαφορικού ανά άξονα και δύο μοτέρ χωρίς διαφορικό αλλά διπλά γρανάζια, δεν προκύπτει να έχει μεγάλη διαφορά. Συνεπώς υπάρχουν επιλογές παρόμοιας αξίας τετρακίνητων αυτοκινήτων με 2, 3 και 4 μοτέρ με τις διαφορές στην λειτουργία τους να είναι πιο έντονες σε αυτά που έχουν περισσότερα μοτέρ. Συνήθως στην επιλογή τετρακίνησης με 3 μοτέρ, η διάταξη είναι πιο αποδοτική με 1 μοτέρ εμπρός και 2 πίσω, λόγω της μεγαλύτερης επιρροής των δυνάμεων στον πίσω άξονα και της μεγαλύτερης ευελιξίας στο πίσω μέρος του αυτοκινήτου. Η διάταξη αυτή δεν μπορεί να υιοθετήσει τη χρήση ταχυτήτων πίσω και αφορά μία καλή επιλογή για χαμηλό κόστος και έντονες δυνάμεις κίνησης στους τροχούς χωρίς απώλειες, ενώ και στον εμπρός άξονα μπορούν να επεμβαίνουν τα φρένα για να δημιουργήσουν διαφοροποίηση της κίνησης.
Διάταξη 1 μπροστά – 2 πίσω
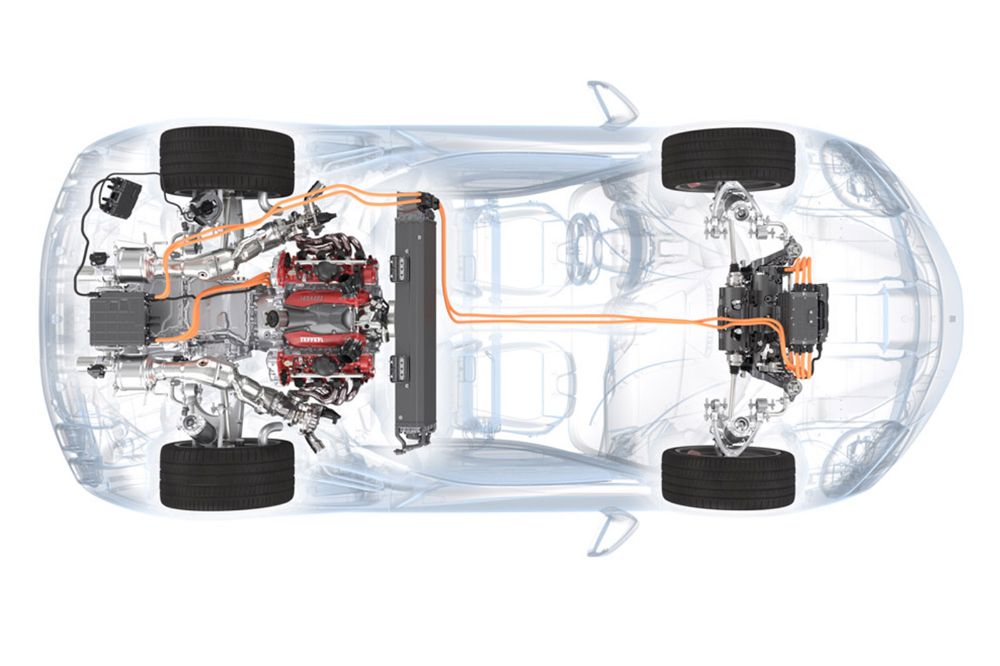
Η διάταξη 1 μοτέρ εμπρός και 2 μοτέρ στον πίσω άξονα, έχει εφαρμοστεί σε σημερινά ηλεκτρικά αυτοκίνητα και παρουσιάζεται ως λύση και για τα μελλοντικά. Η αντίστροφη όμως διάταξη με 2 μοτέρ εμπρός και 1 πίσω δεν φαίνεται να χρησιμοποιείται έστω και σε λίγα μοντέλα. Υπάρχουν όμως αντίστοιχα υβριδικά υπεραυτοκίνητα όπως η κορυφαία Ferrari SF90 Stradale η οποία διαθέτει ένα σύστημα τετρακίνησης με 2 ηλεκτρικά μοτέρ εμπρός διαφοροποιώντας τις δυνάμεις σε εμπρός αριστερό και δεξιό τροχό, ενώ πίσω δίνεται κίνηση από τον συνδυασμό κινητήρα εσωτερικής καύσης και τον ακτινικό ηλεκτροκινητήρα σε ένα ηλεκτρονικά ελεγχόμενο μπλοκέ διαφορικό όπως ακριβώς στην Porsche Taycan. Η διαφορά βρίσκεται στις περισσότερες ταχύτητες όπως είναι φυσικό που χρειάζονται για το κινητήριο σύνολο. Η Ferrari SF90 Stradale καταφέρνει με το σύστημα τετρακίνησης να κάνει πολύ καλούς χρόνους στις πίστες και να έχει πολύ καλή ευελιξία χάρις στα δύο ηλεκτρικά μοτέρ εμπρός.
Συμπερασματικά στα τετρακίνητα ηλεκτρικά αυτοκίνητα η επιλογή της αγοράς μοντέλου με 2, 3 ή 4 μοτέρ έχει διαφορές που προκύπτουν από την ηλεκτρονική διαχείριση και το λογισμικό που δίνει τις εντολές είτε στα φρένα είτε κατευθείαν στα μοτέρ, με τις επιλογές 3 και 4 μοτέρ να έχουν πιο άμεση επίδραση στην οδική συμπεριφορά και πιο αντιληπτή ευελιξία. Τα περισσότερα μοτέρ δεν έχουν απαραίτητα μεγαλύτερο κόστος, όσο όμως οι λειτουργίες τους είναι πιο πολύπλοκες και έντονες, τότε το κόστος μαζί με το εξελιγμένο λογισμικό και την εξελιγμένη ηλεκτρονική διαχείριση ανεβαίνει, ενώ υπάρχει το μειονέκτημα να μην μπορεί να χρησιμοποιηθεί κιβώτιο ταχυτήτων. Θα έχει πολύ ενδιαφέρον να υπάρχει και η διάταξη 2 μοτέρ εμπρός και 1 πίσω με 2, 3 ή 4 ταχύτητες. Μία τέτοια διάταξη θα θέλαμε να δούμε σε τετρακίνητα ηλεκτρικά αυτοκίνητα στο μέλλον, με δυνατότητα μάλιστα να υπάρχει και σε πιο προσιτά μοντέλα σπορ και SUV συνιστώντας μία καλή επιλογή και διευρύνοντας τη γκάμα των ηλεκτρικών μοντέλων.