Η εξέλιξη της τεχνολογίας και η ανάγκη ανάπτυξης των τεχνολογικών συστημάτων έχουν ως κύριο στόχο την ασφάλεια των οδηγών και των επιβατών. Η αναβάθμιση των ήδη υπαρχόντων συστημάτων αυτόνομης οδήγησης που σήμερα υπάρχουν στο μεγαλύτερο μέρος των σύγχρονων αυτοκινήτων (επιπέδου 2) και η περαιτέρω αναβάθμιση της συνδεσιμότητας των αυτοκινήτων παίζουν σημαντικό ρόλο και δρουν ενισχυτικά κατά τη διάρκεια της οδήγησης.
Οι επεμβάσεις των συστημάτων γίνονται σε τέτοιο βαθμό που μπορούν να διορθώσουν λάθη και παραλείψεις του οδηγού που μπορούν να έχουν άσχημο αποτέλεσμα. Αν και στο επίπεδο 5 της αυτόνομης οδήγησης, θα μιλάμε για αυτοκίνητα που θα κινούνται μόνα τους χωρίς να χρειάζεται η επέμβαση του οδηγού, εντούτοις σήμερα τα τεχνολογικά συστήματα μπορούν να προσφέρουν υψηλά επίπεδα ασφάλειας.
Για να εξελιχθεί περαιτέρω αυτή η τεχνολογία των συστημάτων θα πρέπει πρώτα να υπάρξει συνδεσιμότητα των αυτοκινήτων. Στο αυτοκίνητο που διαθέτει συστήματα συνδεσιμότητας, ο οδηγός παραμένει πληροφορημένος σε συνεχή βάση για τις οδικές και κυκλοφοριακές συνθήκες που επικρατούν στον τόπο και τον χρόνο της κίνησής του. Ενημερώνεται για τις όποιες κυκλοφοριακές δυσχέρειες, για την εκτέλεση οδικών έργων ως και για τυχόν προβλήματα του δικτύου των φωτεινών σηματοδοτών. Έτσι η οδήγηση καθίσταται ασφαλέστερη. Μέσα από την συνδεσιμότητα ο υπολογιστής ενός αυτοκινήτου μπορεί να χρησιμοποιήσει δεδομένα που προέρχονται από άλλο αυτοκίνητο, αξιοποιώντας τα με τον καλύτερο τρόπο κατά τη διάρκεια της οδήγησης.
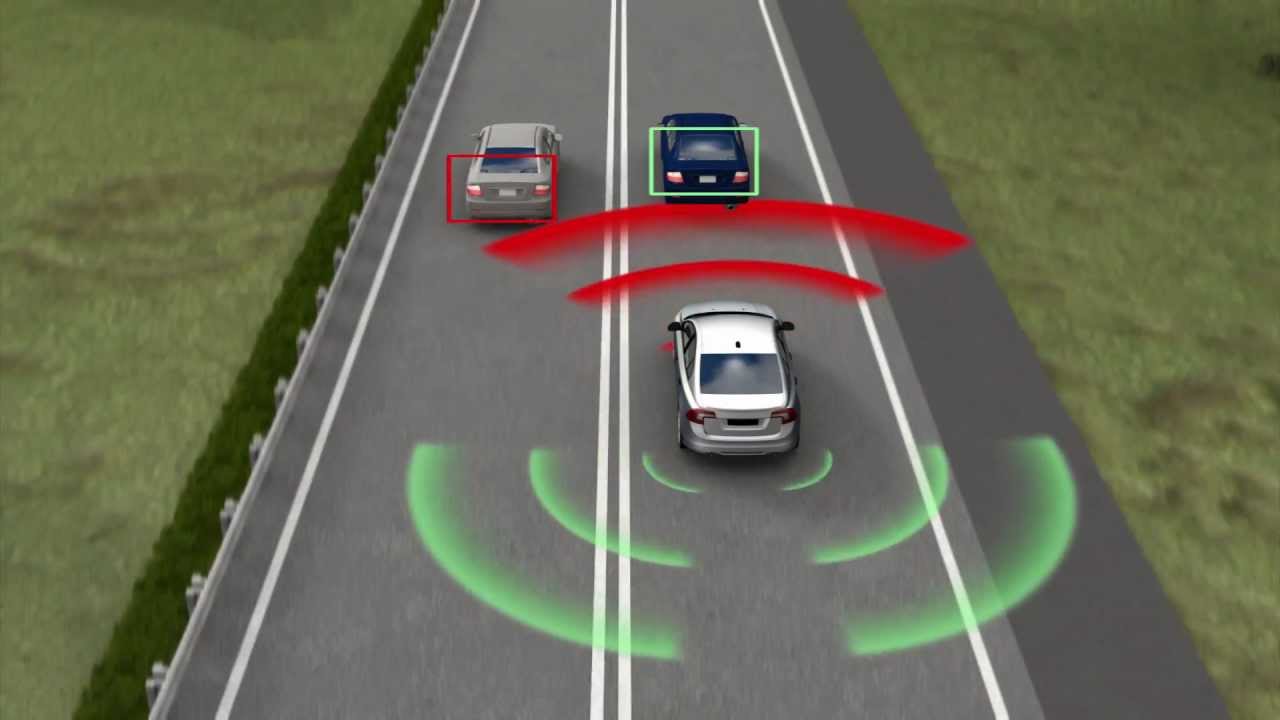
Μέσω της συνδεσιμότητας αποφεύγονται τα ατυχήματα, εφόσον το σύστημα συνδεσιμότητας του αυτοκινήτου ενημερώνεται συνεχώς για την ύπαρξη άλλων οχημάτων σε μικρή απόσταση. Ετσι μπορεί να λειτουργήσει ώστε να αποφεύγονται συγκρούσεις στις οδικές διασταυρώσεις ή ακόμα κατά τους χειρισμούς αλλαγής λωρίδας λόγω των τυφλών σημείων. Επιπλέον, προστατεύονται οι τυχόν απρόσεκτοι χρήστες του δρόμου (πεζοί ή δικυκλιστές) όπου αυτά τα συστήματα προβλέπουν τις κινήσεις τους παίρνοντας τα απαραίτητα μέτρα αντίδρασης.
Στην περίπτωση εφαρμογής της αυτόνομης οδήγησης, διευκολύνεται η συντονισμένη εκτέλεση χειρισμών όπως π.χ. η οδήγηση σε σχηματισμό κατά τον οποίο τα οχήματα κινούνται σε μικρή απόσταση μεταξύ τους (κομβόϊ).
Για κάθε μία από τις εξειδικευμένες εφαρμογές συνδεσιμότητας προβλέπονται διαφορετικά χαρακτηριστικά που αφορούν στην αξιοπιστία και την επαγρύπνηση του συστήματος. Για παράδειγμα οι απαιτήσεις που αφορούν τις εφαρμογές οδικής ασφάλειας είναι αυστηρότερες εκείνων που σχετίζονται με τις κυκλοφοριακές διευκολύνσεις. Αυτονόητο είναι βέβαια ότι οι εφαρμογές που αφορούν στη συντονισμένη αυτόνομη οδήγηση οφείλουν να υπακούν σε αυστηρότατες προδιαγραφές τόσο ως προς την αξιοπιστία τους, όσο και στους χρόνους απόκρισης.
Οι διάφοροι τρόποι επικοινωνίας του οχήματος με το περιβάλλον σημαίνονται με την ονομασία «V2X». Το V αναφέρεται στο όχημα και το Χ συμβολίζει όλες τις πιθανές πηγές ανταπόκρισης με τις οποίες αυτό θα επικοινωνεί. Κατά τη διάρκεια της οδήγησης το ένα όχημα επικοινωνεί με το άλλο που βρίσκεται μέσα στην εμβέλειά του, που συνήθως είναι κοντά τα 800 μέτρα χωρίς να παρεμβάλλονται φυσικά μεγάλα εμπόδια. Ωστόσο οι προδιαγραφές ποικίλλουν. Για την κίνηση σε κομβόι η επικοινωνία περιορίζεται σε λίγα μόνο μέτρα απόσταση, ενώ κατά τη διάρκεια ενός ταξιδιού οι αποστάσεις επικοινωνίας αυξάνονται σε μερικές εκατοντάδες.
Για τις εφαρμογές προειδοποίησης για υπάρχοντα προβλήματα στο δίκτυο σήμανσης, το όχημα χρειάζεται να επικοινωνεί με τα άλλα οχήματα που διαθέτουν την ανάλογη τεχνολογία. Αυτή η επικοινωνία σημειώνεται με την ονομασία «V2R», όπου R είναι ο δρόμος. Σε πολλές όμως άλλες περιπτώσεις τόσο το όχημα όσο και τα παρόδια κέντρα ελέγχου των υποδομών στήριξης της κυκλοφορίας χρειάζεται να επικοινωνήσουν με μεγάλες κεντρικές μονάδες ελέγχου. Αυτής της μορφής οι επικοινωνίες σημαίνονται με τις ονομασίες «V2C» ή «R2C» (Vehicle to Road ή Road to Center).
Αυτά τα τεχνολογικά συστήματα συνδεσιμότητας θα εξελίσσονται παράλληλα με τα συστήματα αυτόνομης οδήγησης και θα υπάρξει σταδιακή τεχνολογική διείσδυση. Στην πρώτη φάση θα ικανοποιηθούν οι ανάγκες ανταλλαγής πληροφοριών για την επικρατούσα κατάσταση τόσο μέσα στο ίδιο το όχημα όσο και τις οδικές υποδομές. Κατόπιν θα αρχίσουν να αξιοποιούνται οι πληροφορίες που θα προέρχονται από διάφορους αισθητήρες όπως για παράδειγμα η διασταύρωση του δρόμου από έναν πεζό. Σε μια επόμενη φάση τα συστήματα θα μπορούν να ανταλλάσσουν πληροφορίες με άλλα συστήματα αυτοκινήτων όπως π.χ. πρόθεση αλλαγής λωρίδας κυκλοφορίας. Στη τέταρτη φάση τα οχήματα θα συντονίζουν πλέον τις κινήσεις τους έτσι ώστε αυτές να εκτελούνται με συνεργασίες τόσο των άλλων οχημάτων, όσο και των συνθηκών κυκλοφορίας, ενώ στην τελευταία φάση τα οχήματα θα κινούνται πλήρως αυτόνομα.
Πηγή: ΑΠΕ-ΜΠΕ








